




E hoʻololi i kāu mau robots humanoid me nā mea hana planetary presisi


Nā pono o ka ʻōnaehana kia honua kiʻekiʻe
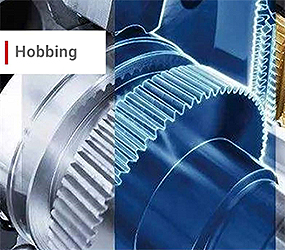
E hoʻonui i ka hoʻolālā o kāu lopako me kā mākou ʻōnaehana kia planetary kiʻekiʻe, kahi e hāʻawi ai i ka hana a me ka hilinaʻi ʻole. Hoʻolālā ʻia e hoʻokō i nā pono koi o nā lopako hou, hāʻawi kēia mau ʻōnaehana kia holomua i ka torque kiʻekiʻe, ka pono a me ka backlash liʻiliʻi.
Hoʻomaopopo kā mākou mau kia honua kiʻekiʻe i ka neʻe mālie a pololei, e kūpono ana iā lākou no nā noi mai nā robots humanoid a i ka automation ʻoihana. Me kahi hoʻolālā liʻiliʻi a me ke kūkulu paʻa, hiki i kēia mau ʻōnaehana kia ke kū i nā paʻakikī o kekahi ʻano kaiapuni me ka hāʻawi ʻana i ka hana kūlike a kiʻekiʻe.
E hoʻololi i kāu mau papahana robotics me kā mākou mau hoʻonā lako hana ʻoi loa a ʻike i ka ʻokoʻa e hana ai ka pololei. E hoʻoikaika i kou mau hiki ke hana hou i kēia lā!
Ka Mana Kūlana
Ma mua o ka hoʻouna ʻana i kā mākou lako, hana mākou i nā hoʻāʻo koʻikoʻi e hōʻoia i kona maikaʻi a hāʻawi i kahi hōʻike maikaʻi piha.
1. Hōʻike Ana:He hōʻike piha no ke ana ʻana a me ka moʻolelo no 5 mau ʻāpana huahana.
2. Palapala Hōʻoia Mea:Hōʻike mea maka a me nā hopena o ka loiloi spectrochemical
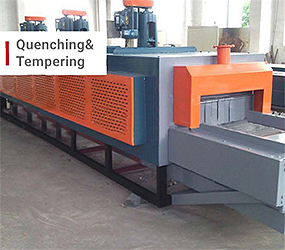
3. Hōʻike Hoʻōla Wela:nā hopena o ka paʻakikī a me ka hoʻāʻo microstructural
4. Hōʻike Pololei:he hōʻike piha e pili ana i ka pololei o ke ʻano K me ka hoʻololi ʻana i ke ʻano a me ke alakaʻi e hōʻike i ka maikaʻi o kāu huahana.
Hale Hana Hana
ʻO nā ʻoihana papa mua he ʻumi ma Kina i lako me nā lako hana hana holomua loa, ka mālama wela a me nā lako hoʻāʻo, a hoʻolimalima i nā limahana akamai ma mua o 1,200. Ua hāʻawi ʻia iā lākou he 31 mau mea hou i hana ʻia a ua hāʻawi ʻia i 9 mau palapala sila, e hoʻopaʻa ana i ko lākou kūlana ma ke ʻano he alakaʻi ʻoihana.





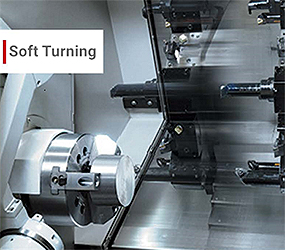
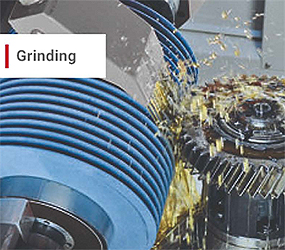
Kahe o ka Hana ʻana

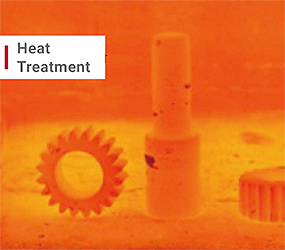


Nānā ʻana
Ua hoʻopukapuka mākou i nā lako hoʻāʻo hou loa, me nā mīkini ana ʻo Brown & Sharpe, ka mīkini ana Hexagon Coordinate Suedena, ka mīkini Integrated Integrated Roughness Mar High Precision, ka mīkini ana Zeiss Coordinate German, ka mīkini ana Klingberg Gear German, ka mīkini ana Profile German a me nā mea hoʻāʻo roughness Kepanī, a pēlā aku. Hoʻohana kā mākou poʻe loea akamai i kēia ʻenehana e hana i nā nānā pololei a hōʻoia i kēlā me kēia huahana e puka mai ana mai kā mākou hale hana e kū i nā kūlana kiʻekiʻe loa o ka maikaʻi a me ka pololei. Ua kūpaʻa mākou e ʻoi aku ma mua o kāu mau manaʻolana i kēlā me kēia manawa.

Nā Pūʻolo

Pūʻolo kūloko
Pūʻolo kūloko

Kāpena

Pūʻolo lāʻau





